Verstärkte Zusammenarbeit mit Aquaveo
27.04.2016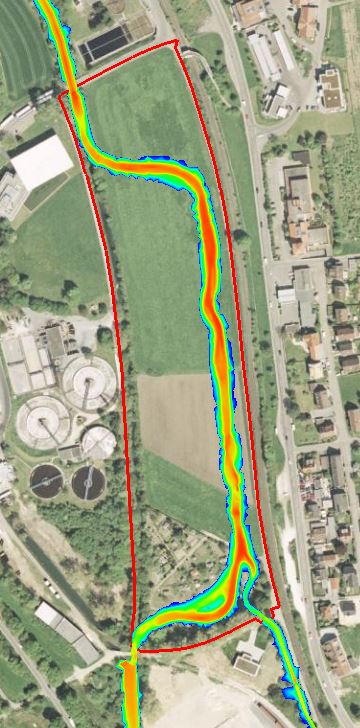
Mit 2D-Simulation gewonnenen Retentionsraum nachweisen
28.04.2016
Funktion zur Wehrsteuerung in HYDRO_AS-2D 4.2
![]() Eine Weiterentwicklung in HYDRO_AS-2D ermöglicht künftig, komplexe Steuerregeln wie z. B. eine Vorabsenkung innerhalb einer Staustufe im 2D-Modell abzubilden. Dadurch lassen sich Steuerungsregeln für den Hochwasserrückhalt durch Wehre testen und optimieren.
Eine Weiterentwicklung in HYDRO_AS-2D ermöglicht künftig, komplexe Steuerregeln wie z. B. eine Vorabsenkung innerhalb einer Staustufe im 2D-Modell abzubilden. Dadurch lassen sich Steuerungsregeln für den Hochwasserrückhalt durch Wehre testen und optimieren.
Bewirtschaftung von Staustufen verbessert Hochwasserschutz
Die angepasste Betriebsweise von Staustufen bietet das Potenzial, entscheidend auf die Retention einer Hochwasserwelle Einfluss zu nehmen. Dazu ist der Wasserspiegel im Stauraum beim Anlaufen der Hochwasserwelle abzusenken und vor Erreichen des Wellenscheitels anzuheben. Dadurch entsteht Rückhaltevolumen, um den Hochwasserscheitel zu kappen. Zusätzliches Volumen kann durch Überstauregelungen generiert werden.
Die Wirksamkeit dieser Staustufenbewirtschaftung hängt wesentlich ab von der Größe des Stauraums, der Kapazität der Wehre, dem Abfluss, dem Unterwasserstand und der Vorhersage der Hochwasserwelle.

Wehr wie dieses in der Donau können durch Vorabsenkung im Hochwasserfall Retentionsvolumen schaffen.
Komplexe Wehrsteuerung modellieren in HYDRO_AS-2D
In HYDRO_AS-2D wurden steuerbare Wehre bisher über eine definierte monoton steigende W-Q-Beziehung als Randbedingung und einen Pegelpunkt als Eingangssteuerungsparameter modelliert.
Wir haben HYDRO_AS-2D um die Randbedingung „H-Wehr (Steuerung)“ erweitert. Das macht es möglich, eine Wehrsteuerung in Abhängigkeit von einem Abfluss und einem Wasserstand im Oberwasser der Staustufe zu simulieren. Der Modellierer gibt dazu Abflussspektren vor, in denen ein bestimmter Wasserstand im Oberwasser durch die Wehrsteuerung eingehalten werden soll.
Beispiel Wehrsteuerung mit Vorabsenkung
Für eine Wehrsteuerung mit Vorabsenkung sind drei Abflussgrenzen (Q1, Q2 und Q3) zum Definieren der Abflussspektren und die gewünschten Wasserspiegellagen im Oberwasserpunkt (W1, W2 und W3) anzugeben.
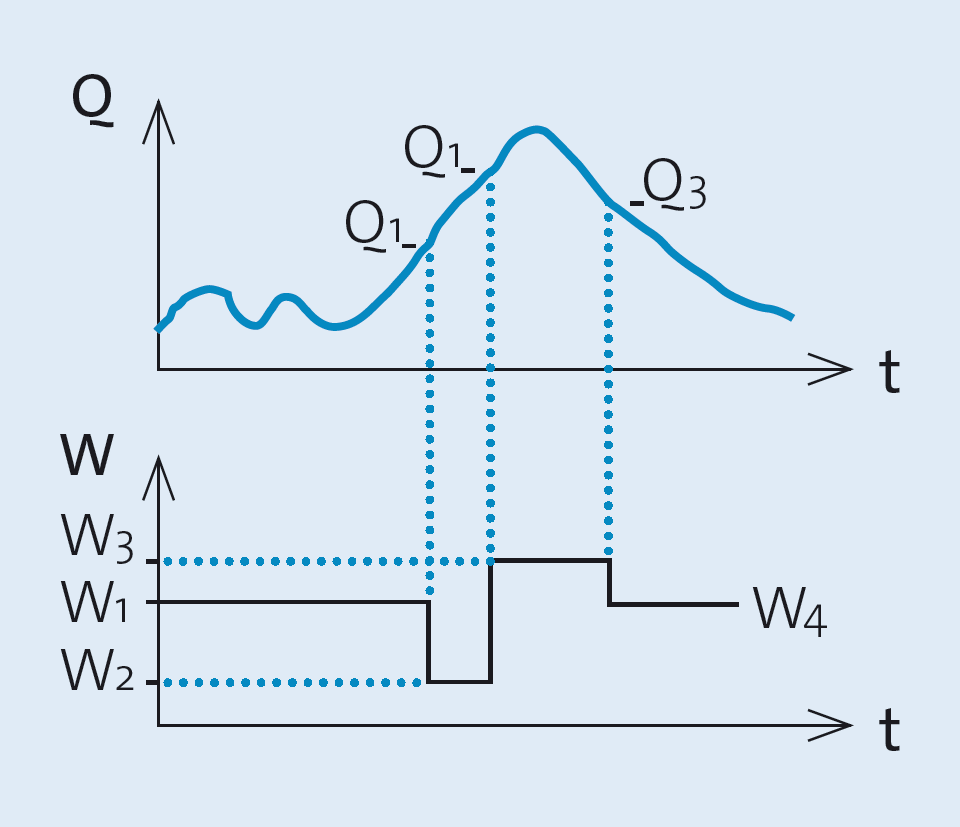
Beispiel einer Wehrsteuerung mit Vorabsenkung im Hochwasserfall. (Q: Abfluss; W: Wasserspiegel z. B. am Kontrollquerschnitt im Oberwasser)
Die Abbildung rechts zeigt die einstellbaren Stauziele im Verlauf eines Hochwassers:
- Spektrum 1: Q < Q1; Normalabfluss, Steuerung auf normales Stauziel W1
- Spektrum 2: Q > Q1; anlaufende Hochwasserwelle, Steuerung auf Vorabsenkungsziel W2
- Spektrum 3: Beginn Q > Q2, Ende Q < Q3; Hochwasserscheitel, Steuerung auf das außergewöhnliche Stauziel W3
- Spektrum 4: Q < Q3; ablaufende Hochwasserwelle, Steuerung auf normales Stauziel W4 = W1
Hohe Realitätsnähe wird dadurch erreicht, dass der Modellierer die Geschwindigkeit der Wehrbewegung (Vorgabe in m/s) sowie die Abflussabminderung infolge unvollkommenen Überfalls (Vorgabe Unterwasserpegel) im Modell berücksichtigen kann.
Wehrsteuerung verfügbar in HYDRO_AS-2D 4.2
Die Erweiterung der Wehrsteuerung wird Modellierern mit dem nächsten Release (HYDRO_AS-2D 4.2) zur Verfügung stehen. Anwendung und Einsatzbeispiele werden wir im Rahmen des Anwendertreffens HYDRO_AS-2D vorstellen, das am 05.10.2016 in München stattfindet.
Dr. rer. nat. Eva Loch, Professor Dr.-Ing. Alpaslan Yörük